

Με την ραγδαία ανάπτυξη της ευφυούς κατασκευής και της ρομποτικής, το επιδέξιο χέρι των ανθρωποειδών ρομπότ αποκτά ολοένα και μεγαλύτερη σημασία ως εργαλείο αλληλεπίδρασης με τον έξω κόσμο. Το επιδέξιο χέρι είναι εμπνευσμένο από την πολύπλοκη δομή και λειτουργία του ανθρώπινου χεριού, η οποία επιτρέπει στα ρομπότ να εκτελούν ποικίλες εργασίες, όπως σύλληψη, χειρισμό, ακόμη και ανίχνευση. Με τη συνεχή πρόοδο του βιομηχανικού αυτοματισμού και της τεχνολογίας τεχνητής νοημοσύνης, τα επιδέξια χέρια μετατρέπονται σταδιακά από ένα μόνο επαναλαμβανόμενο έργο σε ένα ευφυές σώμα ικανό να εκτελεί σύνθετες και μεταβλητές εργασίες. Σε αυτή τη διαδικασία μετασχηματισμού, η ανταγωνιστικότητα του εγχώριου επιδέξιου χεριού εμφανίστηκε σταδιακά, ειδικά στη συσκευή κίνησης, τη συσκευή μετάδοσης, τη συσκευή αισθητήρα κ.λπ., η διαδικασία εντοπισμού είναι γρήγορη, το πλεονέκτημα κόστους είναι προφανές.
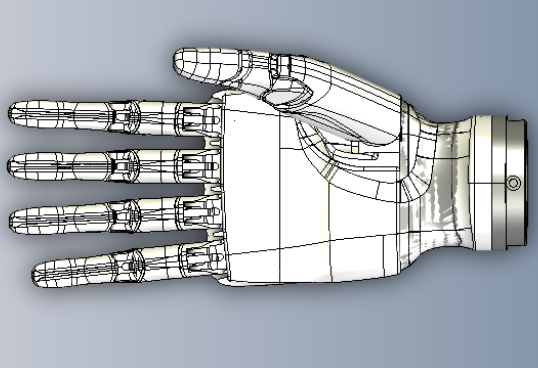
ΠλανητικόςrΌλερsπληρώματααποτελούν το κεντρικό κομμάτι των «άκρων» ενός ανθρωποειδούς ρομπότ και μπορούν να χρησιμοποιηθούν σε μια ποικιλία εφαρμογών, όπως χέρια, πόδια και επιδέξια χέρια, για να παρέχουν ακριβή γραμμικό έλεγχο κίνησης. Ο κορμός Optimus του Tesla χρησιμοποιεί 14 περιστροφικές αρθρώσεις, 14 γραμμικές αρθρώσεις και 12 κοίλες αρθρώσεις σε σχήμα κυπέλλου στο χέρι. Οι γραμμικές αρθρώσεις χρησιμοποιούν 14 αντίστροφες πλανητικές βίδες κυλίνδρων (2 στον αγκώνα, 4 στον καρπό και 8 στο πόδι), οι οποίες κατηγοριοποιούνται σε τρία μεγέθη: 500N, 3.900N και 8.000N, προκειμένου να προσαρμοστούν στις ανάγκες φέρουσας ικανότητας διαφορετικών αρθρώσεων.
Η χρήση ανεστραμμένων πλανητικών βιδών κυλίνδρων από την Tesla στο ανθρωποειδές ρομπότ Optimus μπορεί να βασίζεται στα πλεονεκτήματά τους στην απόδοση, ειδικά όσον αφορά την ικανότητα μεταφοράς φορτίου και την ακαμψία. Ωστόσο, δεν μπορεί να αποκλειστεί ότι τα ανθρωποειδή ρομπότ με χαμηλότερες απαιτήσεις ικανότητας μεταφοράς φορτίου χρησιμοποιούν βίδες με σφαιρίδια χαμηλότερου κόστους.
Μπάλεςσυνεργεία σε διαφορετικούς κλάδους σε ένα ευρύ φάσμα εφαρμογών και ζήτησης της αγοράς:
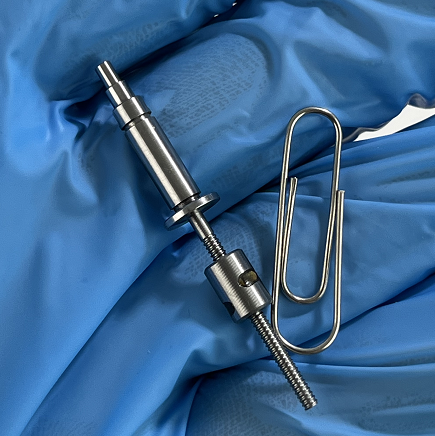
Στην Έκθεση Ρομποτικής του Πεκίνου το 2024, η KGG παρουσίασε πλανητικές βίδες με κυλινδρικό κύλινδρο διαμέτρου 4 mm και σφαιρικές βίδες διαμέτρου 1,5 mm. Επιπλέον, η KGG παρουσίασε επίσης επιδέξια χέρια με ενσωματωμένες λύσεις πλανητικών βιδών με κυλινδρικό κύλινδρο.


Πλανητικές βίδες με κυλινδρικό κύλινδρο διαμέτρου 4 mm


1. Εφαρμογές σε αυτοκίνητα νέας ενέργειας: Με την ανάπτυξη της ηλεκτροκίνησης και της ευφυΐας των αυτοκινήτων, η εφαρμογή τουμπάλαβίδεςστον τομέα της αυτοκινητοβιομηχανίας έχει εμβαθύνει, όπως το σύστημα πέδησης με συρματόσχοινο στην άκρη του τροχού (EMB) για αυτοκίνητα, το σύστημα διεύθυνσης στους πίσω τροχούς (iRWS), το σύστημα διεύθυνσης με συρματόσχοινο (SBW), το σύστημα ανάρτησης κ.λπ., καθώς και οι συσκευές ρύθμισης και ελέγχου για εξαρτήματα αυτοκινήτων.
2. Η εφαρμογή της βιομηχανίας εργαλειομηχανών: η βίδα με σφαιρίδια είναι ένα από τα τυπικά βασικά εξαρτήματα των εργαλειομηχανών, οι εργαλειομηχανές περιέχουν περιστροφικούς άξονες και γραμμικούς άξονες, οι γραμμικοί άξονες αποτελούνται από βίδες καιοδηγοίγια την επίτευξη ακριβούς τοποθέτησης και κίνησης του τεμαχίου εργασίας. Οι παραδοσιακές εργαλειομηχανές χρησιμοποιούν κυρίως τραπεζοειδείς βίδες / συρόμενες βίδες, οι εργαλειομηχανές CNC βασίζονται σε παραδοσιακές εργαλειομηχανές, προσθέτοντας ψηφιακά συστήματα ελέγχου, οι απαιτήσεις ακρίβειας του τεμαχίου εργασίας κίνησης είναι υψηλότερες και χρησιμοποιούνται περισσότερες βίδες με σφαιρίδια. Η παγκόσμια αλυσίδα εφοδιασμού εργοστασίων εργαλειομηχανών στον άξονα, την κεφαλή εκκρεμούς, την περιστροφική τράπεζα και άλλα λειτουργικά εξαρτήματα των περισσότερων εργοστασίων εργαλειομηχανών για λόγους προσαρμογής ή διαφοροποίησης τείνουν να είναι αυτοπαραγωγά και αυτοπαραγωγά, αλλά τα κυλιόμενα λειτουργικά εξαρτήματα είναι ουσιαστικά όλα εξωτερικά, μαζί με τη βιομηχανία εργαλειομηχανών που αναβαθμίζει τα κυλιόμενα λειτουργικά εξαρτήματα της ζήτησης για βιώσιμη ανάπτυξη με τη βεβαιότητα μιας ισχυρής.


Βίδες με σφαιρίδια διαμέτρου 1,5 mm
3. εφαρμογές ανθρωποειδών ρομπότ: Οι ενεργοποιητές ανθρωποειδών ρομπότ χωρίζονται σε υδραυλικούς και μηχανοκίνητους μηχανισμούς των δύο προγραμμάτων. Ο υδραυλικός μηχανισμός, αν και η απόδοση είναι καλύτερη, αλλά το κόστος και το κόστος συντήρησης είναι υψηλότερα και χρησιμοποιούνται λιγότερο αυτήν τη στιγμή. Η λύση του κινητήρα είναι η τρέχουσα κύρια επιλογή, ο πλανητικός κύλινδρος έχει ισχυρή φέρουσα ικανότητα και είναι το βασικό συστατικό του.γραμμικός ενεργοποιητήςτου ανθρωποειδούς ρομπότ, το οποίο χρησιμοποιείται για τον ακριβή έλεγχο των αρθρώσεων του ρομπότ. Το Tesla στο εξωτερικό, το ρομπότ LOLA της Γερμανίας στο Πανεπιστήμιο του Μονάχου, το εγχώριο Πολυτεχνείο Huahui, το Kepler χρησιμοποίησαν αυτήν την τεχνολογική οδό.
Για τις πλανητικές βίδες με κυλινδρικούς κυλίνδρους, η τρέχουσα εγχώρια αγορά πλανητικών βιδών με κυλινδρικούς κυλίνδρους καταλαμβάνεται κυρίως από ξένους κατασκευαστές, με τους κορυφαίους ξένους κατασκευαστές της Ελβετίας Rollvis, της Ελβετίας GSA και του μεριδίου αγοράς της Σουηδίας Ewellix να αντιπροσωπεύουν το 26%, 26%, 14%.
Οι εγχώριες επιχειρήσεις στην βασική τεχνολογία των πλανητικών βιδών με ρολό και οι ξένες επιχειρήσεις υπάρχει ένα ορισμένο χάσμα, αλλά στην ακρίβεια του μολύβδου, το μέγιστο δυναμικό φορτίο, το μέγιστο στατικό φορτίο και άλλες πτυχές απόδοσης σταδιακά καλύπτουν το χαμένο έδαφος, με το εγχώριο μερίδιο αγοράς των κατασκευαστών πλανητικών βιδών με ρολό να φτάνει το 19%.
Ώρα δημοσίευσης: 28 Φεβρουαρίου 2025




